各組員的模擬檔:
28、42-2842模擬
控制方式:
QA上下 Z停止WS後輪正反轉 X停止ED前輪正反轉 C停止
前正後反 左轉前反後正 右轉
37-37模擬
上下控制角度 左右控制前後
4-04模擬
同上37
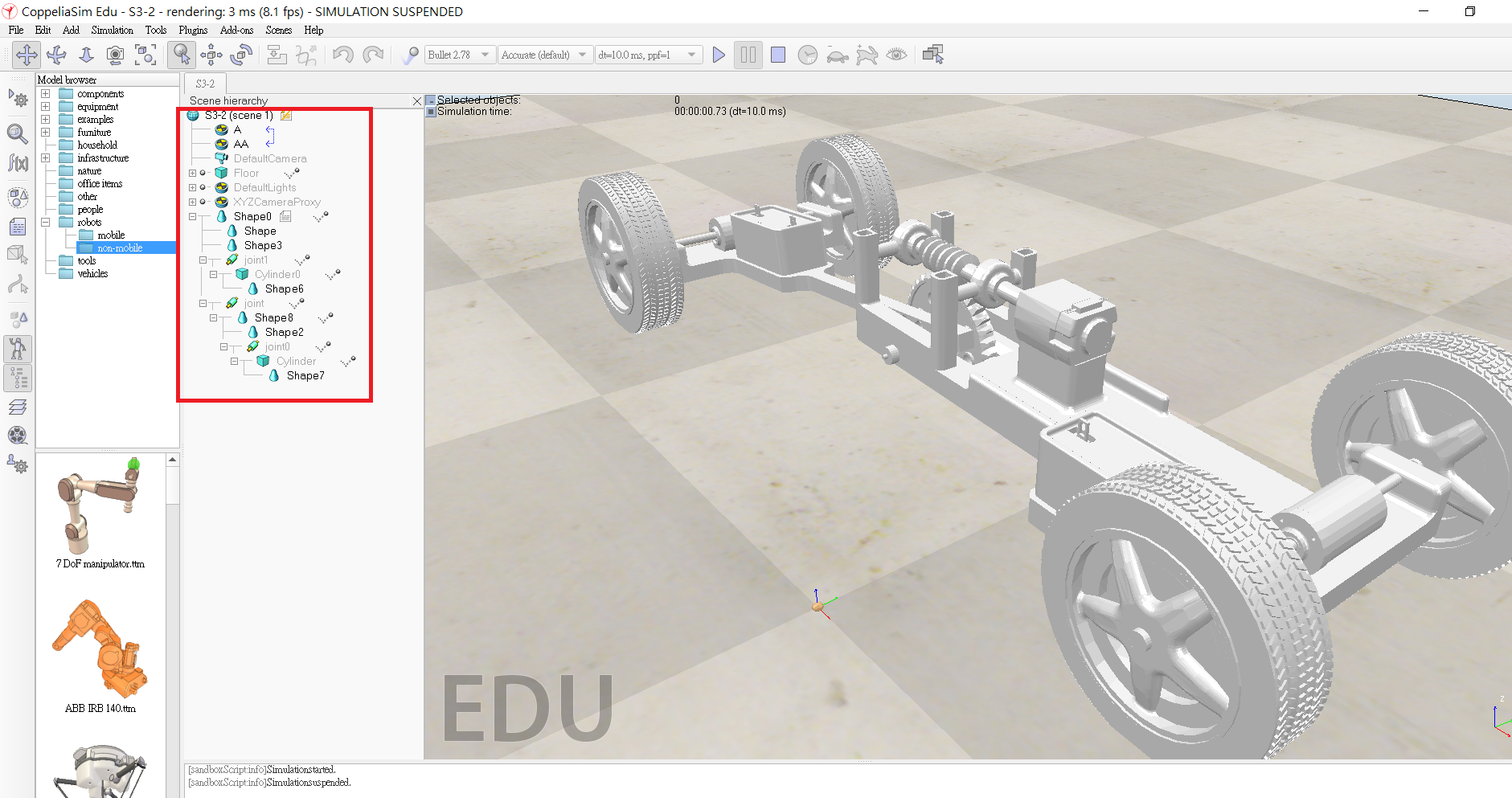
進度:coppelia模擬+lua控制
成果:他可以用方件來控制動作
接下來就會讓產品來攀爬各種地形
Copyright © All rights reserved | This template is made with by Colorlib